Люди стали изобретать первых роботов уже в середине прошлого века. Конечно, первые громоздкие разработки лишь отдаленно напоминали современные
Люди стали изобретать первых роботов уже в середине прошлого века. Конечно, первые громоздкие разработки лишь отдаленно напоминали современные, однако только благодаря их появлению наука смогла продвинуться в изучении и конструировании робототехники. Современный этап развития цивилизации может предложить миллионы модификаций автоматических устройств, давайте познакомимся с самыми известными из них.
В данный момент японские разработчики продолжают модернизировать устройство. Asimo, собранный в 2014 году, представляет собой робота, имеющего высоту 1,5 метра и вес 50 кг. Автоматическое устройство способно самостоятельно маневрировать в пространстве, избегать преграды, выполнять действия в рамках своей программы, например, приносить чай по просьбе человека.
 Роботизированное устройство телеприсутствия VGo управляется при помощи сети Wi-Fi. Робот может передвигаться, говорить, слышать и видеть окружающие его предметы. Пользователь может подключить к системе устройства и использовать его в качестве своеобразной камеры.
Роботизированное устройство телеприсутствия VGo управляется при помощи сети Wi-Fi. Робот может передвигаться, говорить, слышать и видеть окружающие его предметы. Пользователь может подключить к системе устройства и использовать его в качестве своеобразной камеры.
Подобная разработка создана для людей с ограниченными возможностями, которые не могут посещать определенные места. Например, ребенок-инвалид может видеть свой школьный класс, находясь при этом дома. Он сможет получать задания и следить за уроками посредством робота VGo.
Данный робот был представлен в 2005 году. BigDog – это четырехногое устройство, которое способно преодолевать значительные расстояния. Длина модели BigDog составляет 1,5 метра, высота достигает 1 метра. Вес такого робота равен 110 кг. С помощью него человек может транспортировать грузы весом до 150 кг, минимальная скорость движения робота составит 6 км/ч.
 Сотрудники университета Цюриха создали Roboy. Данный экспонат имеет движимые сухожилия, поэтому его жесты напоминают человеческие. Конструкция Roboy имеет мягкую поверхность, можно ощутить отдельные суставы. Робот умеет выражать разные эмоции. Считается, что он стал бы хорошим помощником для одиноких пожилых людей, лишенных внимания, заботы и ухода.
Сотрудники университета Цюриха создали Roboy. Данный экспонат имеет движимые сухожилия, поэтому его жесты напоминают человеческие. Конструкция Roboy имеет мягкую поверхность, можно ощутить отдельные суставы. Робот умеет выражать разные эмоции. Считается, что он стал бы хорошим помощником для одиноких пожилых людей, лишенных внимания, заботы и ухода.
![]() Это гигантский робот, имеющий высоту 4 метра. Вес устройства достигает 4,5 тонн. Он подразумевает наличие водителя, который управляет машиной из кабинки. Существует возможность руководить действиями гиганта на расстоянии с помощью дистанционной панели. Максимальная скорость передвижения робота Kuratas достигает 10 км/ч.
Это гигантский робот, имеющий высоту 4 метра. Вес устройства достигает 4,5 тонн. Он подразумевает наличие водителя, который управляет машиной из кабинки. Существует возможность руководить действиями гиганта на расстоянии с помощью дистанционной панели. Максимальная скорость передвижения робота Kuratas достигает 10 км/ч.
Создателем устройства выступил японский художник Когоро Курата, который спроектировал его на основе дизайна из аниме. Робототехник Ватару Йошизаки дополнил конструкцию. Стоимость робота – 1,3 миллиона долларов.
Итальянские специалисты разработали робота-гуманоида под названием iCub, внешний вид которого практически полностью повторяет строение человеческого тела. Устройство откликается, когда его зовут по имени. Оно способно идентифицировать знакомых людей, запоминать названия и свойства неодушевленных предметов.

Автоматическое устройство iCub может ориентироваться в пространстве и находить выход из сложных лабиринтов. Его научили стрелять из лука с идеальной точностью.
14.06.2006, 15:46Робот (чеш. robot, от robota - подневольный труд, rob - раб), машина с антропоморфным (человекоподобным) поведением, которая частично или полностью выполняет функции человека (иногда животного) при взаимодействии с окружающим миром. Первые упоминания о человекоподобных машинах встречаются ещё в древнегреческих мифах. Термин "робот" был впервые введён К. Чапеком в пьесе "R. U. R." (1920), где Роботами называли механических людей. В настоящее время робототехника превратилась в развитую область промышленности: тысячи промышленных роботов работают на различных предприятиях мира, подводные манипуляторы стали непременной принадлежностью подводных исследовательских и спасательных аппаратов, изучение космоса опирается на широкое использование роботов с различным уровнем интеллекта. С развитием робототехники определились 3 разновидности Роботов: с жёсткой программой действий; манипуляторы, управляемые человеком-оператором; с искусственным интеллектом (иногда называемые интегральными), действующие целенаправленно ("разумно") без вмешательства человека. Большинство современных Роботов (всех трёх разновидностей) - Роботы манипуляторы , хотя существуют и другие виды Роботов (например, информационные, шагающие и т. п.). Возможно объединение Роботов первой и второй разновидностей в одной машине с разделением времени их функционирования. Допустима также совместная работа человека с Роботами третьего вида (в так называемом супервизорном режиме). Первые Роботы ("андроиды" , имитировавшие движения и внешний облик человека) использовались преимущественно в развлекательных целях. С 30-х гг. в связи с автоматизацией производства Роботы - автоматы стали применять в промышленности наряду с традиционными средствами автоматизации технологических процессов, в частности в мелкосерийном производстве и особенно в цехах с вредными условиями труда.
Роботизация
- вытеснение людей из производительного процесса,
с заменой их на автоматизированные и роботизированные станки и производственные линии,
в связи с чем высвобождаются ресурсы для развития сферы услуг.
 Промышленный Робот
манипулятор
имеет "механическую руку"
(одну или несколько) и вынесенный пульт управления или встроенное устройство
программного управления, реже ЭВМ. Он может, например, перемещать детали массой
до нескольких десятков кг в радиусе действия его "механических рук" (до 2 м),
выполняя от 200 до 1000 перемещений в час. Промышленные Роботы
- автоматы
имеют преимущество перед человеком в скорости и точности
выполнения ручных однообразных операций. Наиболее распространены
Роботы
манипуляторы
с дистанционным управлением и "механической рукой",
закрепленной на подвижном или неподвижном основании. Оператор управляет
движением
манипулятора, одновременно наблюдая её непосредственно либо на телевизионном
экране; в последнем случае. Роботы снабжается "телевизионным глазом" -
передающей телевизионной камерой. Часто Робот оснащают обучающейся
автоматической системой управления. Если такому Роботу "показывают"
последовательность операций, то система управления фиксирует
всё в виде программы управления и затем точно воспроизводит при работе.
Роботы
манипуляторы
используют для работы в условиях относительной недоступности
либо в опасных, вредных для человека условиях, например в атомной
промышленности, где они применяются с 50-х гг. В 60-х гг. появились подводные
Роботы
манипуляторы
разнообразных конструкций и назначения: от
глубоководных управляемых аппаратов с "механическими руками" (в частности, для захвата образцов породы
со дна моря и т. д.) и ползающих по морскому дну платформ с исследовательской
аппаратурой до подводных бульдозеров и буровых установок.
Подобные манипуляторы применяются и в космонавтике, на американских "Шаттлах".
Промышленный Робот
манипулятор
имеет "механическую руку"
(одну или несколько) и вынесенный пульт управления или встроенное устройство
программного управления, реже ЭВМ. Он может, например, перемещать детали массой
до нескольких десятков кг в радиусе действия его "механических рук" (до 2 м),
выполняя от 200 до 1000 перемещений в час. Промышленные Роботы
- автоматы
имеют преимущество перед человеком в скорости и точности
выполнения ручных однообразных операций. Наиболее распространены
Роботы
манипуляторы
с дистанционным управлением и "механической рукой",
закрепленной на подвижном или неподвижном основании. Оператор управляет
движением
манипулятора, одновременно наблюдая её непосредственно либо на телевизионном
экране; в последнем случае. Роботы снабжается "телевизионным глазом" -
передающей телевизионной камерой. Часто Робот оснащают обучающейся
автоматической системой управления. Если такому Роботу "показывают"
последовательность операций, то система управления фиксирует
всё в виде программы управления и затем точно воспроизводит при работе.
Роботы
манипуляторы
используют для работы в условиях относительной недоступности
либо в опасных, вредных для человека условиях, например в атомной
промышленности, где они применяются с 50-х гг. В 60-х гг. появились подводные
Роботы
манипуляторы
разнообразных конструкций и назначения: от
глубоководных управляемых аппаратов с "механическими руками" (в частности, для захвата образцов породы
со дна моря и т. д.) и ползающих по морскому дну платформ с исследовательской
аппаратурой до подводных бульдозеров и буровых установок.
Подобные манипуляторы применяются и в космонавтике, на американских "Шаттлах".
В конце 60-х гг. в робототехнике возникло новое научное направление, связанное с созданием интеллектуальных Роботов. Такие Роботы имеют датчики очувствления (сенсорную систему), воспринимающие информацию об окружающей обстановке, устройство обработки полученной информации (искусственный интеллект) - специализированную ЭВМ с набором программ - и исполнительные механизмы (моторную систему). Действия интеллектуального Робота обладают некоторыми признаками человеческого поведения: датчики собирают информацию о предметах окружающего мира, их свойствах и взаимодействии; на основе этих данных искусственный интеллект формирует модель внешнего окружения и принимает решение о последовательности действий Робота, которые реализуются исполнительными механизмами. К 1975 интеллектуальные Роботы находились в стадии научных разработок и попыток использования их в промышленности. Работы над искусственным интеллектом проводились также и в НИИ военно-промышленного комплекса.
Робот – это универсальный автомат, позволяющий выполнять механические действия. Его принципиальной особенностью является быстрая оперативная перестройка с одной выполняемой операции на другую. Существует несколько разновидностей роботов и для каждого из них имеется своё определение. Чаще всего говорят о трёх поколениях роботов: промышленных роботах или манипуляторах, адаптивных роботах и роботах с искусственным интеллектом или как говорили раньше – интегральных роботах.
 Конец 19 и начало 20 столетий характеризуется выдающимися открытиями в
области науки и техники. Появились и начали широко применяться различные
электрические устройства, генераторы тока, электрические двигатели,
аккумуляторы, были изобретены телеграф и телефон. Электрическая энергия начала
использоваться всё шире и шире. В начале 20 столетия начали интенсивно
развиваться новые науки – радиотехника, электроника. Новые научные открытия и
изобретения позволили проблему создания роботов перевести на новый, более
совершенный фундамент. Появились реальные возможности оснастить робот зрением –
фотоэлементами, слухом – микрофонами, речью – громкоговорителями.
Конец 19 и начало 20 столетий характеризуется выдающимися открытиями в
области науки и техники. Появились и начали широко применяться различные
электрические устройства, генераторы тока, электрические двигатели,
аккумуляторы, были изобретены телеграф и телефон. Электрическая энергия начала
использоваться всё шире и шире. В начале 20 столетия начали интенсивно
развиваться новые науки – радиотехника, электроника. Новые научные открытия и
изобретения позволили проблему создания роботов перевести на новый, более
совершенный фундамент. Появились реальные возможности оснастить робот зрением –
фотоэлементами, слухом – микрофонами, речью – громкоговорителями.
 В то же время начали появляться первые плоды науки, которая
позже стала называться кибернетикой. Учёные и инженеры начали разрабатывать
устройства, которых, хоть и скромно называли кибернетическими игрушками,
создавали отнюдь не для развлечения. Они служили примером практического
воплощения идей автоматического управления, моделировали поведение живых
организмов в простейших ситуациях. Большую известность среди этих кибернетических игрушек
приобрели устройства, напоминающие черепах, жуков, белок, собак и др. Первые
простейшие схемы таких устройств, способных двигаться в направлении света,
разработал основатель кибернетики Н. Винер.
В то же время начали появляться первые плоды науки, которая
позже стала называться кибернетикой. Учёные и инженеры начали разрабатывать
устройства, которых, хоть и скромно называли кибернетическими игрушками,
создавали отнюдь не для развлечения. Они служили примером практического
воплощения идей автоматического управления, моделировали поведение живых
организмов в простейших ситуациях. Большую известность среди этих кибернетических игрушек
приобрели устройства, напоминающие черепах, жуков, белок, собак и др. Первые
простейшие схемы таких устройств, способных двигаться в направлении света,
разработал основатель кибернетики Н. Винер.
Наибольшую известность приобрели три “черепашки” , созданные английским биофизиком и нейрофизиологом Г. Уолтером в 1950 – 1951 гг. Эти устройства представляют собой самодвижущиеся электромеханические игрушки, способные ползти на свет или от него, обходить препятствия, заходить в “кормушку” для подзарядки разрядившихся аккумуляторов и тому подобное. “Черепашки ” приводятся в движение с помощью двух электродвигателей, питаемых от аккумуляторов. Первый двигатель обеспечивает поступательное движение устройства, второй, расположенный на рулевой колонке, изменяет направление движения. Чувствительными элементами первых двух “черепашек ” Г. Уолтера являются фотоэлемент, расположенный на рулевой колонке, и механический контакт, замыкаемый при наезде на препятствие. Управление поведением осуществляется с помощью несложной электронной схемы с обратной связью. Несмотря на очень простое устройство, “черепашки ” демонстрируют забавные свойства. В темноте или при слабом свете они беспорядочно ползают, как будто что-то ищут. Натыкаясь на препятствие, они сворачивают и пытаются их обойти. Если имеется достаточно сильный источник света, они его скоро “замечают” и решительно направляются в его сторону (положительный тропизм). Однако подойдя к свету слишком близко, они от него отворачиваются (отрицательный тропизм). Теперь они двигаются вокруг источника света, находя для себя оптимальные условия и непрерывно поддерживая их (гомеостазис). Между двумя источниками света “черепашки ” совершают путешествия от одного к другому, наподобие буриданова осла, который, как известно, умер от голода, находясь между двумя одинаковыми копнами сена, не будучи в состоянии выбрать, какой из них вкуснее. Две черепашки “видят” и “узнают” друг друга по зажженной лампочке и ползут друг другу навстречу.
Самые современные роботы
В аптеках Шанхая работают роботы-фармацевты
.
Надо просто нажать на сенсорный экран с описанием симптомов, и робот поставит
диагноз и даст необходимые рекомендации. Дальше остается только предложить
автомату купюру, и лекарство можно забирать.
 Роботы-санитары.
Роботы-санитары.
Работают в некоторых британских больницах. Роботы производит сухую и влажную
уборку, сами выбрасывают мусор, заправляются чистящими средствами и
подзаряжаются. В отличие от живых уборщиц, никогда не бубнят
под нос и отличаются доброжелательным отношением к окружающим. Встретив кого-то
на своем пути, они извиняются и докладывают, чем они сейчас заняты.
 В Южной Корее сконструировали сторожевого робопса
для
охраны частных усадеб. Пес весит 40 кг, в его нос встроена фотокамера, а в
корпусе имеется сотовый телефон, который немедленно посылает сигнал хозяину в
случае обнаружения опасности. В критических случаях робот способен сам вызвать
полицию.
В Южной Корее сконструировали сторожевого робопса
для
охраны частных усадеб. Пес весит 40 кг, в его нос встроена фотокамера, а в
корпусе имеется сотовый телефон, который немедленно посылает сигнал хозяину в
случае обнаружения опасности. В критических случаях робот способен сам вызвать
полицию.
Робот-фотограф.
Его называют «стоп-кадр» и используют для фотографирования людей на вечеринках и
других мероприятиях. Робот сам выбирает оптимальный ракурс и наводит объектив на
лица. Как правило, 90 процентов снимков, сделанных роботом, оказываются
удачными.
 Японский семейный робот
.
Японский семейный робот
.
Он запоминает до 7 членов семьи и распознает их по лицам или голосу. Словарный
запас – 65 тыс. фраз и 1000 отдельных слов. Он держит в памяти привычки каждого
члена семьи и пытается находить к каждому подход. Он краснеет в ответ на шутку и
бледнеет в замешательстве.
И еще одно изобретения японцев - Рободансер
.
Робот-танцор способен попеременно выдавать диско, панк, фанк, рок, хипхоп, брэйк
и т.д. Заряда батареи хватает на 45 минут. За это время робот предлагает
всевозможные движения для танцующих вокруг людей. В ушах у него стерео
микрофоны, которые улавливают малейшие звуки. В начале следующего года
планируется поставить таких роботов на ведущие дискотеки мира.
 Механическая актиния.
Механическая актиния.
Зачем это нужно, непонятно, но робот точно имитируют поведение морской актинии.
У него гибкое силиконовое тело, а пять щупалец чутко реагируют на освещение и
движения внутри и за стеклом аквариума. Напуганный робот-актиния уползает в
угол.
Мисс любезность
.
Это робот – личный помощник, которого можно возить с собой на симпозиумы и
конференции. Робот Грейс самостоятельно нашла дорогу в зал заседаний, не сбив
никого на своем пути, а в зале поприветствовала всех улыбкой и взмахом руки.
Робот постоянно совершенствуется и пополняет свой словарный запас. Грейс уже
может ездить на эскалаторе, понимает несложные фразы и пытается общаться.
Крысы-киборги:
американские ученые вживили микрочип в мозг крыс. Теперь крысами можно управлять
на расстоянии 500 метров. Предполагается, что киборги будут незаменимыми в
поиске людей, оказавшихся под завалами.
 Ученые американского университета Карнеги сконструировали
робота-старика
. Это очень занимательный и милый андроид с чертами старого
горемыки из русских народный сказок. Простенькая система интеллекта позволяет
роботу сносно общаться с окружающими. При этом он по-старчески шамкает, бубнит
что-то под нос, чихает и икает. На расспросы он отвечает, что из семьи пастуха,
а главное его изобретение – это плитка шоколада. Наибольший восторг публики
робот вызывает, когда просит простить его за старческий маразм.
Ученые американского университета Карнеги сконструировали
робота-старика
. Это очень занимательный и милый андроид с чертами старого
горемыки из русских народный сказок. Простенькая система интеллекта позволяет
роботу сносно общаться с окружающими. При этом он по-старчески шамкает, бубнит
что-то под нос, чихает и икает. На расспросы он отвечает, что из семьи пастуха,
а главное его изобретение – это плитка шоколада. Наибольший восторг публики
робот вызывает, когда просит простить его за старческий маразм.
«Робот – машина. В этом можно не сомневаться, хотя, наверное, некоторые люди будут воспринимать их как домашних животных, ибо такова человеческая природа. Только стандартизация дешёвых роботов общего назначения поможет нам ещё глубже осознать бесконечное разнообразие типов человеческой внешности и поведения. Будем надеяться, что это поможет нам быть терпимее друг к другу». Дж. Янг.
Первый Закон:
Робот
не может причинить вред человеку или своим бездействием
допустить, чтобы человеку был причинен вред.
Второй Закон:
Робот
должен повиноваться командам человека, если эти команды не
противоречат Первому Закону.
Третий Закон:
Робот
должен заботиться о своей безопасности, поскольку это не
противоречит Первому и Второму законам.
Законы для роботов сформулировал Айзек Азимов в своём произведении "Три закона робототехники
".
Автоботы и десептиконы, которые уже давно заполонили магазины игрушек, надолго заняли и экраны кинотеатров с выходом первого фильма «Трансформеры». Имена роботов, таких как Оптимус Прайм и Мегатрон стали также известны, как Гарри Поттер и Волан-де-Морт. Автомобили, которые на самом деле пришельцы, превращающиеся в человекоподобных существ, пришлись по душе зрителям. А желтый Chevrolet Camaro по имени Бамблби и вовсе стал любимцем многих.
Совсем скоро на экраны выходит пятая часть киносерии, самое время пересматривать предыдущие части. А вы знаете как выглядят герои «Трансформеров»? Имена тоже все знакомы? Давайте проверим это на последнем на данный момент фильме «Трансформеры: Эпоха истребления». Тем более что события новой ленты являются продолжением предыдущей.
«Эпоха истребления» задает киносерии новое направление. После вторжения в Чикаго, автоботы попали в немилость. В фильме затрагивается именно тема испортившихся отношений «люди/трансформеры». Имена Оптимуса Прайма, Бамблби и команды становятся известны всему миру, ведь это имена опасных созданий.
Примечательно, что в «Эпохе истребления» затрагивается многообразная мифология трансформеров, сюжет охватывает значительно большее количество событий, чем первые три фильма, которые были построены исключительно на сражении автоботов против десептиконов. Появляется новый подвид - диноботы - еще одно доказательство того, что команда фильма серьёзно вознамерилась отойти от предыдущей сюжетной линии.
Учитывая, что изначально режиссёр собирался остановиться на трех фильмах, можно считать, что это новая эра для фильма «Трансформеры»
Оптимус Прайм - мудрый и грозный лидер автоботов. В начале фильма он предстает в образе ржавого, покалеченного грузовика Marmon, но позже преображается в магистральный тягач Western Star 4900.

Бамблби. С самого начал он был верным помощником Оптимуса Прайма и защитником человечества. Несмотря на поврежденный голосовой модуль, Бамблби активно общается, переключая радиостанции и подбирая подходящие композиции. Изначально в фильме он предстает в виде Chevrolet Camaro 1967 года, а затем становится блестящим Camaro 2014.

Рэтчет. По своей природе он не боец, но является ценным членом команды - медиком. Он решает встать на сторону автоботов, потому что чувствует, что именно у них есть все шансы достичь мира - единственное, что его действительно интересует. Трансформируется в спасательный внедорожник что в очередной раз показывает его миролюбивый настрой.

Хаунд. Карикатурный персонаж, который несмотря на устрашающий вид, любит называть Землю своим домом и как ребенок радуется простым вещам. В фильме он выглядит как тяжеловооруженный артиллерист с роботизированной бородой и любовью использовать патроны в качестве сигар. Его механизированный облик - тактический автомобиль Oshkosh.

Кроссхейрс - мастер по оружию, парашютист. Приходит на смену погибшему в третьей части фильма Айронхайду. Кроссхейрс не большой фанат Земли и при случае не против ее покинуть. Трансформируется в Chevrolet C7 Corvette 2014 года.

Дрифт. Изначально был на стороне десептиконов, но после переметнулся к автоботам. В фильме он предстает в образе спокойного самурая, умело владеющего мечами и практически не имеющего себе равных. Трансформируется в потрясающий Bugatti Veyron Grand Sport Vitesse 2013 года и любит при случае подрифтовать по улицам города.


Джанкхип. Солдат десептиконов, единственной целью существования которого является битва с автоботами. Трансформируется в мусоровоз.

Локдаун. Несмотря на то что находится он в списке десептиконов, технически Локдаун не является частью ни одной из сторон. Он безжалостный межгалактический охотник за головами, которого наняли, чтобы он выследил одного их автоботов, скрывающихся на Земле. Кто его нанял и на кого он охотится не раскрывается. Трансформируется в Lamborghini Aventador 2013 года.

Гримлок . Упертый лидер диноботов. Не любит слушать никого, включая Оптимуса Прайма. Больше начальства ненавидит десептиконов. Превращается в мощного металлического Тиранозавра-Рекса.
Слэш . Хитрый охотник Велоциратопс, напарник Хаунда.

У кого-то из роботов была лишь пара секунд экранного времени, кто-то отвоевал себе значительную долю сюжета, но благодаря стараниям команды, каждый из них - и автоботы, и десептиконы и диноботы, на экране выглядят потрясающе детализировано и впечатляюще мощно.
Как и в предыдущих фильмах, создатели постарались включить как можно больше персонажей, на радость поклонникам серии фильмов «Трансформеры». Имена персонажей полюбившейся истории были рассмотрены нами в данной статье.
Роботы ― технические устройства, выполняющие определенный набор операций. С древних времен люди пытались создать машины, заменяющие действия живого человека. Был найден чертёж человекоподобного робота, сделанный Леонардо да Винчи в XV веке.
В настоящее время роботы не всегда похожи на людей. Существует большое количество стационарных станков-манипуляторов, позволяющих дистанционно или вообще без вмешательства человека осуществлять сложные и точные операции. Такие механизмы широко применяются в промышленности и медицине.

Наиболее распространенными подвижными роботами являются колесные и гусеничные. Небольшие модели устройств такого типа можно собрать своими руками на основе готовых плат-контролеров. Колесные и гусеничные основы используются для роботов разного типа: от марсоходов до помощников по дому.
Кроме колесных и гусеничных роботов существуют шагающие. Механизмы этого типа передвигаются, поочередно переставляя отдельные опоры, как люди и животные. Подобный подход к передвижению позволяет, например, перемещаться по лестнице, а также быстро и гибко реагировать на возникающие препятствия. Построение шагающих роботов – непростая задача. Для управления приводами «ног» создаются программные алгоритмы, сложность которых существенно возрастает с каждым дополнительным требованием к передвижению.
Примером шагающего робота является четвероногий BigDog, разработанный в США для военных целей. Робот-собака предназначен для передвижения по труднодоступным местам и перемещения грузов при минимальном контроле человека. Четыре независимые точки опоры позволяют преодолевать препятствия, недоступные для колесной и гусеничной техники. В ходе тестирования BigDog показал способность двигаться по неровной наклонной поверхности, а также восстанавливать равновесие после удара сбоку.

Скорость колесных роботов соизмерима со средствами передвижения. А какую скорость может развивать шагающий робот? Например, робот-гепард Cheetah, созданный в Массачусетском технологическом институте (MIT), двигается со скоростью более 30 км/ч. Высокая скорость достигается за счет гибкого «позвоночника» и особого алгоритма движения, определяющего, с какой силой каждая нога отталкивается от земли. Робот-гепард способен не только развивать, но и поддерживать высокую скорость, работать без проводов, а также преодолевать невысокие барьеры. Последнее свойство обеспечивается алгоритмом расчета траектории прыжка.

При создании человекоподобных машин ученые столкнулись с проблемой: система с двумя точками опоры менее устойчива, чем с четырьмя. Большая часть гуманоидов снабжена гусеничной или колесной платформой. Двуногий робот Atlas от компании Boston Dynamics удерживает равновесие, наклоняя корпус и двигая руками, как человек. К тому же, Atlas способен использовать верхние конечности как дополнительную опору при движении по наклонной поверхности и для преодоления препятствий.

Одним из ярких примеров андроида является девушка-робот Repliee Q2, разработанная японскими учеными. Эта модель отличается не скоростью и равновесием, а умением взаимодействовать с людьми. Набор камер и микрофонов позволяет четко отслеживать речь, мимику и жесты собеседника. Верхняя часть тела приводиться в движение большим количеством маленьких приводов, что обеспечивает плавность движений и точную регуляцию положения тела. Кожа робота сделана из силиконового каучука, что позволяет воспроизводить мимику человека. Repliee Q2 может вести длительные беседы, шутить, реагируя на слова и действия собеседника.

В настоящее время робототехника активно развивается. Создаются более точные хирургические манипуляторы, машины, способные преодолевать любые препятствия, искусственные интеллекты и андроиды, удивительно похожие на живых людей.
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид

ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

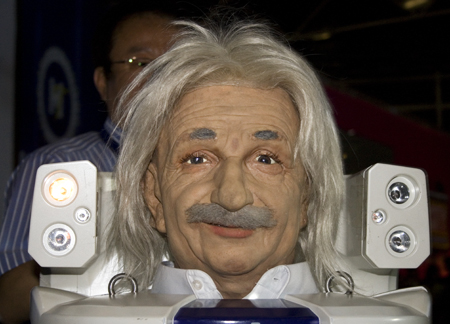
Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.
Stanley: самоуправляемое транспортное средство
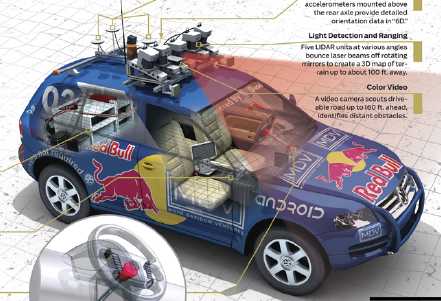
Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул

БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.

QRIO: танцующий робот

QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.











